用于立体相机在线自标定的校准单应法
本文主要是针对 “Dive Deeper into Rectifying Homography for Stereo Camera Online Self-Calibratio” 论文中提及的一种用于立体相机在线自标定的校准单应法进行梳理。该方法适用于单对图像,当有多对图像亦可使用全局优化外参。...
本文主要是针对 “Dive Deeper into Rectifying Homography for Stereo Camera Online Self-Calibratio” 论文中提及的一种用于立体相机在线自标定的校准单应法进行梳理。该方法适用于单对图像,当有多对图像亦可使用全局优化外参。...
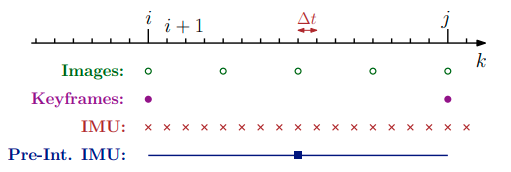
本文介绍了一种基于 ${\bf SE_2}({\bf 3})$ 自同构指数函数的改进 IMU 预积分公式,可以有效增强快速旋转运动和延长积分时间下的跟踪性能。...
众所周知,线特征比点特征可以提供更多的约束条件,并且在某些场合下比点特征要鲁棒。但是如果想要把线特征加入到 SLAM 系统中,将面临的是如何参数化和优化求导的问题。本文结合一系列相关文献,对线特征在 SLAM 中的应用做一个概括梳理。...

A Fast and Robust Novel Online Rectification Algorithm 双目立体算法通常假设一对校正的图像作为输入,而双目相机设备通常都有出厂标定。然而,双目原本的结构可能随着设备使用的过程中发生了微小的形变,使得深度立体算法的最初假设不成立,由此会严重影响性能。因此,双目在线自校正功能的需求越来越备受关注。文献 1 提出了一种快速稳健的新型在线校正算法,针对已知镜头内参与畸变系数的先前条件下获取双目相机的外参以便精准匹配恢复出深度信息。其基本思路是将这一校正问题建模为对两台相机中每一台相机的矫正旋转 $\omega_0, \omega_1$ 的估计,并保持基线固定。这是更为常见的以估计旋转 $R$ 和平移 $t$ 算法形式的变形方式。在这两种情况下,需要估计的参数都为 5 个,因此位移尺度是未知的。通常情况下往往假设 baseline $\lVert t \rVert$ 的长度是固定不变的。 ...
视觉惯性里程计和 SLAM 算法被广泛应用于各个领域,如服务机器人、无人机和自主车辆。大多数 SLAM 算法都是基于地标是静态的假设。然而,在现实世界中,存在各种动态物体,它们会降低姿势估计的准确性。此外,暂时静止的物体,在观察过程中是静止的,但当它们离开视线时就会移动,可能会触发误报回环。为了克服这些问题,作者提出了一个新的视觉-惯性 SLAM 框架,称为 DynaVINS ,它对动态物体和暂时的静态物体都具有鲁棒性。在该框架中,首先提出了一个稳健的光束平差法(捆绑调整),通过利用由 IMU 预积分估计的姿势先验,可以拒绝来自动态物体的特征。然后,提出了一个关键帧分组和一个基于多假设的约束分组方法,以减少临时静态物体在回环检测中的影响。随后,作者在一个包含众多动态物体的公共数据集中评估了该方法。最后,实验结果证实,与其他最先进的方法相比,提出的 DynaVINS 具有良好的性能,成功地拒绝了动态和临时静态对象的影响。...
探测移动物体是处理动态环境的一项基本能力。大多数移动物体检测算法都是针对没有深度的彩色图像设计的。对于机器人导航来说,实时的 RGB-D 数据往往是现成的,利用深度信息将有利于障碍物的识别。文章中提出了一种使用 RGB-D 图像的简单移动物体检测算法。该算法不需要估计背景模型。相反,它使用遮挡模型,使我们能够在一个被占主导地位的移动物体混淆的背景上估计摄像机的姿势。所提出的算法允许将运动物体检测和视觉里程计 (VO) 分开,这样就可以在动态情况下结合移动物体检测来采用任意的鲁棒性 VO 方法。...
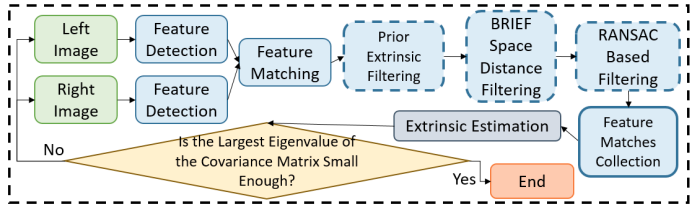
本文主要是针对 “High-Precision Online Markerless Stereo Extrinsic Calibration” 论文中提及的一种实时无标记的方法来获得高精度的双目外参进行梳理,该方法使用了一种新颖的 5 自由度和流形非线性优化,使得视觉双目标定具备可观测性...
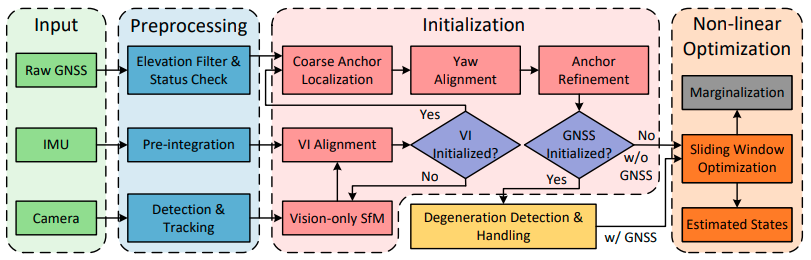
GNSS-视觉-惯性紧耦合的状态估计器主要是将 GNSS (Global Navigation Satellite System) 原始测量,结合视觉和惯性信息紧耦合以进行实时和无漂移的状态估计...
IMU Preintegration factor In VINS 对于一个基于非线性图优化且利用滑动窗口固定计算量的紧耦合视觉惯导里程计,在求解 Bundle Adjustment 里有一项 IMU 预积分测量残差项(点击这里)。VINS-Mono1 中 IMU 预积分的算法可以参照该文章2。在 VINS 系统里 IMU 约束因子如下: ...
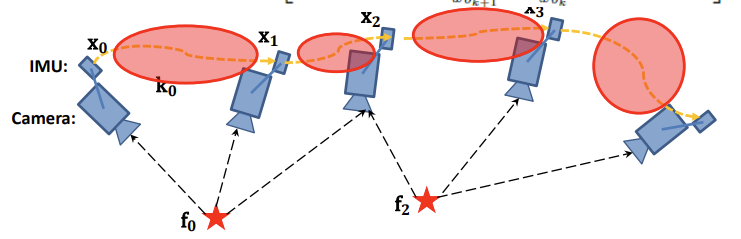
本文主要参照 C Forster 于 15 年拓展到李理论上的 IMU 预积分技术文章进行推导演绎...