基于 ${\bf SE_2}({\bf 3})$ 的精确 IMU 预积分
本文介绍了一种基于 ${\bf SE_2}({\bf 3})$ 自同构指数函数的改进 IMU 预积分公式,可以有效增强快速旋转运动和延长积分时间下的跟踪性能。...
本文介绍了一种基于 ${\bf SE_2}({\bf 3})$ 自同构指数函数的改进 IMU 预积分公式,可以有效增强快速旋转运动和延长积分时间下的跟踪性能。...
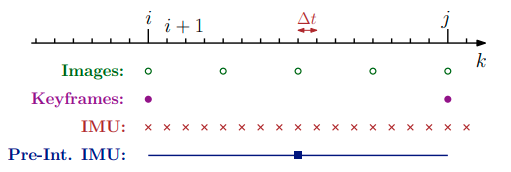
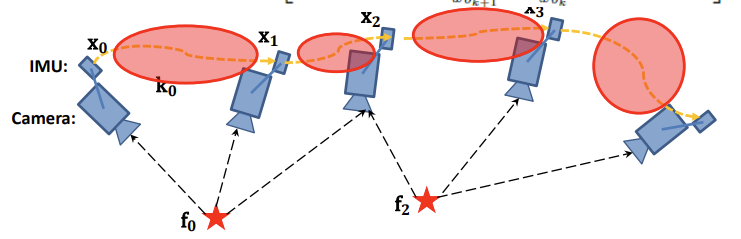
IMU Preintegration factor In VINS 对于一个基于非线性图优化且利用滑动窗口固定计算量的紧耦合视觉惯导里程计,在求解 Bundle Adjustment 里有一项 IMU 预积分测量残差项(点击这里)。VINS-Mono1 中 IMU 预积分的算法可以参照该文章2。在 VINS 系统里 IMU 约束因子如下: ...
本文主要参照 C Forster 于 15 年拓展到李理论上的 IMU 预积分技术文章进行推导演绎...