ORB 特征
ORB 算法原理 ORB (Oriented FAST and Rotated BRIEF)1 算法是对 FAST 特征点检测和 BRIEF (Binary robust independent elementary features)2 特征描述子的一种结合,在原有的基础上做了改进与优化,使得 ORB 特征具备多种局部不变性,并为实时计算提供了可能34。 ...
ORB 算法原理 ORB (Oriented FAST and Rotated BRIEF)1 算法是对 FAST 特征点检测和 BRIEF (Binary robust independent elementary features)2 特征描述子的一种结合,在原有的基础上做了改进与优化,使得 ORB 特征具备多种局部不变性,并为实时计算提供了可能34。 ...
简介 Haar 特征1是一种用于目标检测或识别的图像特征描述子,Haar 特征通常和 AdaBoost 分类器组合使用,而且由于 Haar 特征提取的实时性以及 AdaBoost 分类的准确率,使其成为人脸检测以及识别领域较为经典的算法。 多种Haar-like特征 在 Haar-like 特征23提出之前,传统的人脸检测算法一般是基于图像像素值进行的,计算量较大且实时性较差。 Papageorgiou 等人最早将 Harr 小波用于人脸特征表示,Viola 和 Jones 则在此基础上,提出了多种形式的 Haar 特征。Lienhart 等人对 Haar 矩形特征做了进一步的扩展,加入了旋转 $45^{\circ}$ 的矩形特征,因此现有的 Haar 特征模板主要如下图所示: ...
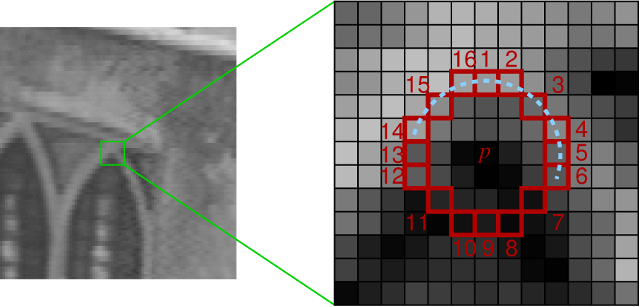
FAST 角点原理 FAST的全称为 Features From Accelerated Segment Test 。是由 Edward Rosten 和 Tom Drummond 在 2006 年发表的 Machine learning for high-speed corner detection 1 文章中提出。FAST 角点定义为:若某像素点与周围邻域足够多的像素点处于不同区域,则该像素可能为角点。考虑灰度图像,即若某像素点的灰度值比周围邻域足够多的像素点的灰度值大或小,则该点可能为角点。与其他特征点相比较而言,FAST 在进行角点检测时,计算速度更快,实时性更好。23 ...
特征检测 特征检测 (Feature detection) 也称为角点检测 (Corner detection),特征检测和匹配是许多计算机视觉应用中的一个重要组成部分,广泛应用于运动检测12345678。图像匹配、视频跟踪、三维建模以及目标识别领域中。在 SLAM 前端,往往需要通过特征跟踪 (Feature tracking) 来先初步恢复相机的位姿。那么一张图向中的哪些特征是适合用来做匹配跟踪呢?通常拥有交大对比尺度(梯度)的图像块是比较容易定位的,又由于单一方向的直线段存在 “孔径问题 (aperture problem)” ,因而拥有至少两个(明显)不同方向梯度的图像块最容易定位。如下图所示: ...