ROS 中 cv_bridge 与 OpenCV 版本不匹配问题
1. 问题 ROS 版本中通用安装方式下的 cv_bridge 所编译采用的 OpenCV 版本是自带默认的。这个时候与我们本地安装的 OpenCV 版本可能存在不符。在这种情况下,有一定的概率在运行代码时候产生莫名其妙的 bug ,不但难以定位问题,而且通常并非是代码问题。通常在编译过程中会出现类似如下 warning ,这个时候就需要特别注意: ...

1. 问题 ROS 版本中通用安装方式下的 cv_bridge 所编译采用的 OpenCV 版本是自带默认的。这个时候与我们本地安装的 OpenCV 版本可能存在不符。在这种情况下,有一定的概率在运行代码时候产生莫名其妙的 bug ,不但难以定位问题,而且通常并非是代码问题。通常在编译过程中会出现类似如下 warning ,这个时候就需要特别注意: ...
文章中提出了一种线匹配算法,该算法利用线的局部外观及其几何属性。为了克服线段碎片和几何变化的问题,在尺度空间中提取线。 为了描述线条的局部外观,作者设计了一种名为线带描述符(Line Band Descriptor, LBD)的新型线条描述符。为了评估线对之间的几何一致性,定义了线对之间的几何属性。然后,构建了候选线匹配的关系图,并采用光谱技术来有效地解决这个匹配问题。所提算法的优点如下: (1) 由于采用了多尺度线条检测策略,该算法对图像变换具有很强的鲁棒性;(2) 由于设计的 LBD 描述符计算速度快,且外观相似性降低了图匹配问题的维度,该算法具有很高的效率;(3) 由于采用了成对几何一致性评估方法,该算法即使对于低纹理图像也具有很高的准确性。...

检测局部特征,例如角点、线段或斑点,是许多计算机视觉应用程序流程中的第一步。 它的速度对于实时应用程序至关重要。在本文中介绍一种快速有效的线段检测器 ELSED 。该线段检测器效率的关键是局部片段增长算法,该算法在存在微小不连续性的情况下连接梯度对齐的像素。 所提出的算法不仅可以在硬件非常低端的设备上运行,而且还可以根据任务的需求进行参数化,以促进短或长线段的检测。...

文章提出了一种新颖的边缘段检测算法,该算法可以实时运行并产生高质量的边缘段,每个边缘段都是一个线性像素链。与传统的边缘检测器在阈值梯度幅度集群上工作以确定边缘元素不同的是,所提出的方法首先沿着行和列发现被称为锚的稀疏点,然后通过一个智能的、启发式的边缘追踪程序连接这些锚,因此被称为边缘绘制 (Edge Drawing, ED) 。ED 产生的边缘图总是由干净的、完全连续的、定位良好的、一像素宽的边缘组成。边缘质量指标在本质上得到了满足,不需要进一步的边缘连接程序。此外,ED 还能够将结果以向量形式输出为链式边缘段数组。在各种图像上的实验表明,ED 产生了高质量的边缘图,并且比已知的Canny边缘检测器的最快实现(OpenCV 的实现)快了10% 。...
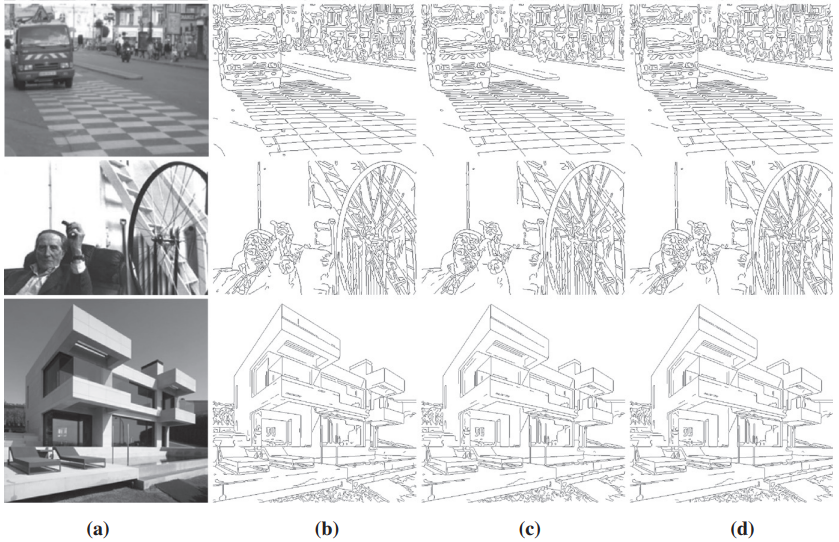
LSD 是一种线段检测算法,该方法能在较短的时间内获取较高精度的直线段检测结果。LSD 直线检测算法首先计算图像中所有点的梯度大小和方向,然后将梯度方向变化小且相邻的点作为一个连通域,接着根据每一个域的矩形度判断是否需要按照规则将其断开以形成多个矩形度较大的域,最后对于生成的所有域做改善和筛选,保留其中满足条件的域,即为最后的直线检测结果。该算法的优点在于检测速度快,而且无需参数调节,利用错误控制的方法,提高直线检测的准确度。...

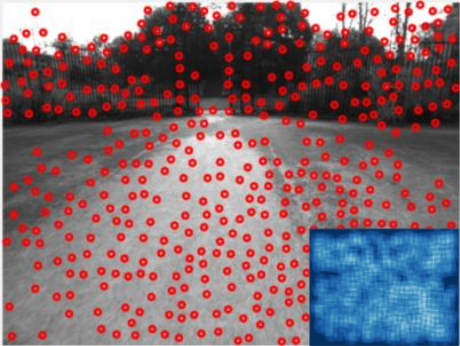
关键点检测通常会产生大量的关键点,这些关键点大多是聚类的、多余的和嘈杂的。这些关键点通常需要特殊处理,如自适应非最大限度抑制(ANMS),以保留最相关的关键点。在本文中,我们提出了三种新的有效的 ANMS 方法,确保快速和均匀地重新划分图像中的关键点。为此,我们提出了一个搜索范围的正方形近似,以抑制不相关的点,从而降低 ANMS 的计算复杂性。为了进一步加快所提出的方法,我们还引入了一种新的策略,根据图像维度初始化搜索范围,从而导致更快的收敛。为了突出我们的方法和初始化策略的有效性和可扩展性,我们进行了详尽的调查并与现有的方法进行了比较。...
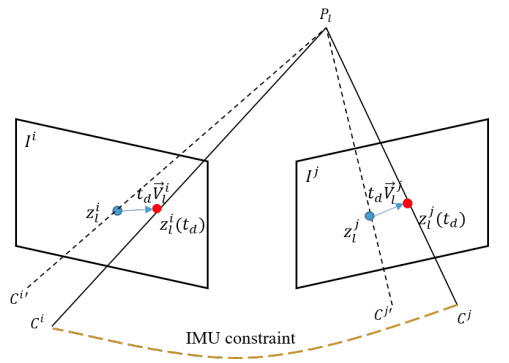
Online Temporal Calibration in VINS 1. 数据同步 不同传感器之间的数据同步对融合算法至关重要,在 VIO 中,相机与 IMU 之间的数据同步对 VIO 精度影响非常大。那么如何评判一个系统数据同步的好坏呢?参照1提供的图片来简单分析下。 ...
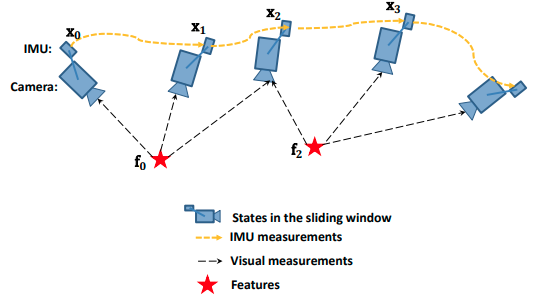
本文介绍了基于图优化的滑动窗口紧耦合视觉惯性里程计中的视觉因子该如何创建与建模,并且如何构建残差用于优化系统...
简介 加速鲁棒特征 (Speed Up Robust Feature, SURF) 12 和 SIFT 特征类似,同样是一个用于检测、描述、匹配图像局部特征点的特征描述子。SIFT 是被广泛应用的特征点提取算法,但其实时性较差,如果不借助于硬件的加速和专用图形处理器 (GPUs) 的配合,很难达到实时的要求。对于一些实时应用场景,如基于特征点匹配的实时目标跟踪系统,每秒要处理数十帧的图像,需要在毫秒级完成特征点的搜索定位、特征向量的生成、特征向量的匹配以及目标锁定等工作,SIFT 特征很难满足这种需求。SURF 借鉴了 SIFT 中近似简化 (DoG 近似替代 LoG) 的思想,将 Hessian 矩阵的高斯二阶微分模板简化,使得模板对图像的滤波只需要进行几次简单的加减法运算,并且这种运算与滤波模板的尺寸无关。SURF 相当于 SIFT 的加速改进版本,在特征点检测取得相似性能的条件下,提高了运算速度。整体来说,SURF 比 SIFT 在运算速度上要快数倍,综合性能更优345。 ...
简介 尺度不变特征变换 (Scale-invariant feature transform, SIFT) 12 是计算机视觉中一种检测、描述和匹配图像局部特征点的方法,通过在不同的尺度空间中检测极值点或特征点 (Conrner Point, Interest Point) ,提取出其位置、尺度和旋转不变量,并生成特征描述子,最后用于图像的特征点匹配。SIFT 特征凭借其良好的性能广泛应用于运动跟踪 (Motion tracking) 、图像拼接 (Automatic mosaicing) 、3D 重建 (3D reconstruction) 、移动机器人导航 (Mobile robot navigation) 以及目标识别 (Object Recognition) 等领域3。 ...