基于 LBD 描述子和成对几何一致性的高效鲁棒线段匹配方法
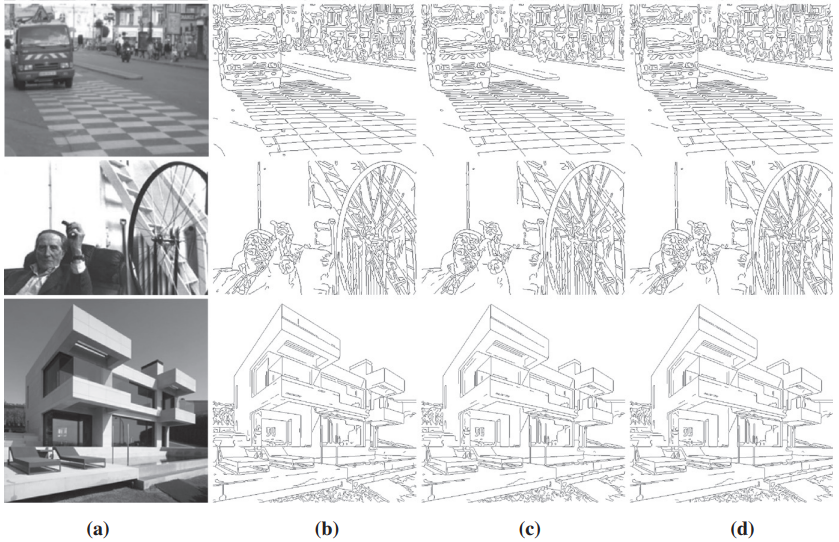
文章中提出了一种线匹配算法,该算法利用线的局部外观及其几何属性。为了克服线段碎片和几何变化的问题,在尺度空间中提取线。 为了描述线条的局部外观,作者设计了一种名为线带描述符(Line Band Descriptor, LBD)的新型线条描述符。为了评估线对之间的几何一致性,定义了线对之间的几何属性。然后,构建了候选线匹配的关系图,并采用光谱技术来有效地解决这个匹配问题。所提算法的优点如下: (1) 由于采用了多尺度线条检测策略,该算法对图像变换具有很强的鲁棒性;(2) 由于设计的 LBD 描述符计算速度快,且外观相似性降低了图匹配问题的维度,该算法具有很高的效率;(3) 由于采用了成对几何一致性评估方法,该算法即使对于低纹理图像也具有很高的准确性。...