用于立体相机在线自标定的校准单应法
本文主要是针对 “Dive Deeper into Rectifying Homography for Stereo Camera Online Self-Calibratio” 论文中提及的一种用于立体相机在线自标定的校准单应法进行梳理。该方法适用于单对图像,当有多对图像亦可使用全局优化外参。...
本文主要是针对 “Dive Deeper into Rectifying Homography for Stereo Camera Online Self-Calibratio” 论文中提及的一种用于立体相机在线自标定的校准单应法进行梳理。该方法适用于单对图像,当有多对图像亦可使用全局优化外参。...
相机与激光雷达的联合使用被广泛的应用到了机器人、自动驾驶等领域。为了使这两种传感器进行数据融合,进需要对其进行一个联合标定。该文章介绍了两种激光雷达 (2D & 3D) 与相机的标定方式。...

A Fast and Robust Novel Online Rectification Algorithm 双目立体算法通常假设一对校正的图像作为输入,而双目相机设备通常都有出厂标定。然而,双目原本的结构可能随着设备使用的过程中发生了微小的形变,使得深度立体算法的最初假设不成立,由此会严重影响性能。因此,双目在线自校正功能的需求越来越备受关注。文献 1 提出了一种快速稳健的新型在线校正算法,针对已知镜头内参与畸变系数的先前条件下获取双目相机的外参以便精准匹配恢复出深度信息。其基本思路是将这一校正问题建模为对两台相机中每一台相机的矫正旋转 $\omega_0, \omega_1$ 的估计,并保持基线固定。这是更为常见的以估计旋转 $R$ 和平移 $t$ 算法形式的变形方式。在这两种情况下,需要估计的参数都为 5 个,因此位移尺度是未知的。通常情况下往往假设 baseline $\lVert t \rVert$ 的长度是固定不变的。 ...
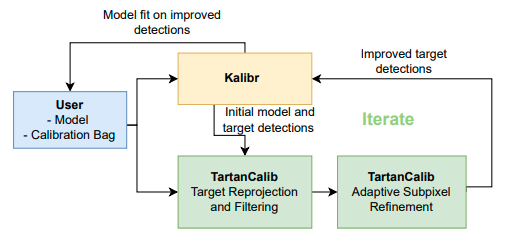
TartanCalib: Iterative Wide-Angle Lens Calibration using Adaptive SubPixel Refinement of AprilTags 广角相机以小、轻、经济高效的外形提供丰富的信息,在移动机器人被广泛选用。内参和外参的精确标定是使用广角镜头边缘进行深度感知和里程测量的关键先决条件。使用当前最先进的技术标定广角镜头会产生较差的结果,这是由于边缘处的极度失真,因为大多数算法假设镜头的低到中等失真(更接近针孔投影)。在这项工作中12,作者提出了精确广角标定的方法。论文的 pipelines 生成一个中间模型,并利用它迭代改进特征检测,最终改进相机参数。作者使用了三种利用中间相机模型的关键方法:(1)将图像分解为虚拟针孔相机,(2)将目标重新投影到图像帧中,以及(3)自适应亚像素细化。将自适应子像素细化和特征重投影相结合,可将重投影误差显著提高26.59%,帮助检测到最多42.01%的特征,并提高密集深度映射下游任务的性能。最后,TartanCalib 是开源的,并在一个易于使用的标定工具 Kalibr3 中实现。系统模型流程如下。 ...
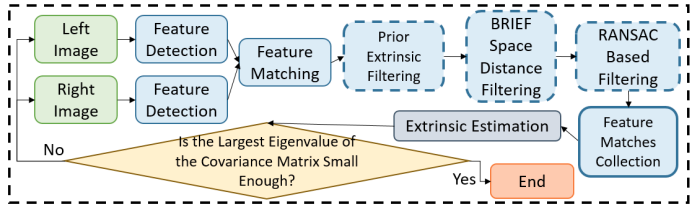
本文主要是针对 “High-Precision Online Markerless Stereo Extrinsic Calibration” 论文中提及的一种实时无标记的方法来获得高精度的双目外参进行梳理,该方法使用了一种新颖的 5 自由度和流形非线性优化,使得视觉双目标定具备可观测性...