VINS 系统中的边缘化因子
VINS 系统中的边缘化策略及如何利用因子图构建 BA 优化过程中的 Hessian 矩阵...
VINS 系统中的边缘化策略及如何利用因子图构建 BA 优化过程中的 Hessian 矩阵...
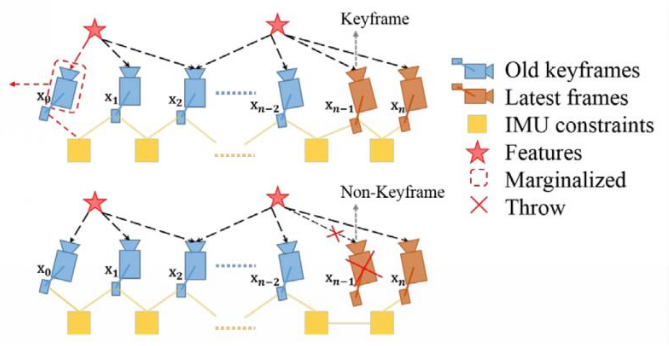
滑动窗口与边缘化在目前实时的 SLAM/VIO/VINS 系统用得越来越多,在即保留历史信息的情况下约束计算量,是一种非常有价值的方式...
滑动窗口与边缘化在目前实时的 SLAM/VIO/VINS 系统用得越来越多,在即保留历史信息的情况下约束计算量,是一种非常有价值的方式...
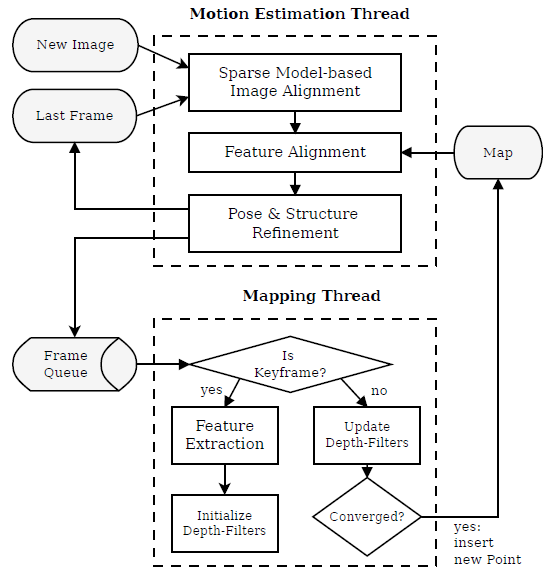
Semi-Direct Visual Odometry, 半直接视觉里程计...
Semi-Direct Visual Odometry, 半直接视觉里程计...
三维重建的起源 从一组二维视图重建世界的三维结构在计算机视觉领域有着悠久的历史。这是一个经典的不适定问题 (ill-posed problem),因为重构一组一致的观察或图像相通常并不是唯一的。因此,我们需要附加一些假设。在数学上,研究三维场景与观测到的二维投影之间的几何关系是基于两种类型的变换,即, ...
线性空间的基本概念 向量空间 如果集合 $V$ 在矢量求和 (vector summation) $$ {+} : V \times V \to V $$ 以及标量乘法 (scalar multiplication) $$ \cdot : \mathbb{R} \times V \to V $$ 运算下是闭合的,那么集合 $V$ 就称为在 $\mathbb{R}$ 域上的线性空间 (linear space) 或 向量空间 (vector space) 。 ...
简介 加速鲁棒特征 (Speed Up Robust Feature, SURF) 12 和 SIFT 特征类似,同样是一个用于检测、描述、匹配图像局部特征点的特征描述子。SIFT 是被广泛应用的特征点提取算法,但其实时性较差,如果不借助于硬件的加速和专用图形处理器 (GPUs) 的配合,很难达到实时的要求。对于一些实时应用场景,如基于特征点匹配的实时目标跟踪系统,每秒要处理数十帧的图像,需要在毫秒级完成特征点的搜索定位、特征向量的生成、特征向量的匹配以及目标锁定等工作,SIFT 特征很难满足这种需求。SURF 借鉴了 SIFT 中近似简化 (DoG 近似替代 LoG) 的思想,将 Hessian 矩阵的高斯二阶微分模板简化,使得模板对图像的滤波只需要进行几次简单的加减法运算,并且这种运算与滤波模板的尺寸无关。SURF 相当于 SIFT 的加速改进版本,在特征点检测取得相似性能的条件下,提高了运算速度。整体来说,SURF 比 SIFT 在运算速度上要快数倍,综合性能更优345。 ...
简介 尺度不变特征变换 (Scale-invariant feature transform, SIFT) 12 是计算机视觉中一种检测、描述和匹配图像局部特征点的方法,通过在不同的尺度空间中检测极值点或特征点 (Conrner Point, Interest Point) ,提取出其位置、尺度和旋转不变量,并生成特征描述子,最后用于图像的特征点匹配。SIFT 特征凭借其良好的性能广泛应用于运动跟踪 (Motion tracking) 、图像拼接 (Automatic mosaicing) 、3D 重建 (3D reconstruction) 、移动机器人导航 (Mobile robot navigation) 以及目标识别 (Object Recognition) 等领域3。 ...
ORB 算法原理 ORB (Oriented FAST and Rotated BRIEF)1 算法是对 FAST 特征点检测和 BRIEF (Binary robust independent elementary features)2 特征描述子的一种结合,在原有的基础上做了改进与优化,使得 ORB 特征具备多种局部不变性,并为实时计算提供了可能34。 ...