线特征在 SLAM 中的应用
众所周知,线特征比点特征可以提供更多的约束条件,并且在某些场合下比点特征要鲁棒。但是如果想要把线特征加入到 SLAM 系统中,将面临的是如何参数化和优化求导的问题。本文结合一系列相关文献,对线特征在 SLAM 中的应用做一个概括梳理。...

众所周知,线特征比点特征可以提供更多的约束条件,并且在某些场合下比点特征要鲁棒。但是如果想要把线特征加入到 SLAM 系统中,将面临的是如何参数化和优化求导的问题。本文结合一系列相关文献,对线特征在 SLAM 中的应用做一个概括梳理。...
视觉惯性里程计和 SLAM 算法被广泛应用于各个领域,如服务机器人、无人机和自主车辆。大多数 SLAM 算法都是基于地标是静态的假设。然而,在现实世界中,存在各种动态物体,它们会降低姿势估计的准确性。此外,暂时静止的物体,在观察过程中是静止的,但当它们离开视线时就会移动,可能会触发误报回环。为了克服这些问题,作者提出了一个新的视觉-惯性 SLAM 框架,称为 DynaVINS ,它对动态物体和暂时的静态物体都具有鲁棒性。在该框架中,首先提出了一个稳健的光束平差法(捆绑调整),通过利用由 IMU 预积分估计的姿势先验,可以拒绝来自动态物体的特征。然后,提出了一个关键帧分组和一个基于多假设的约束分组方法,以减少临时静态物体在回环检测中的影响。随后,作者在一个包含众多动态物体的公共数据集中评估了该方法。最后,实验结果证实,与其他最先进的方法相比,提出的 DynaVINS 具有良好的性能,成功地拒绝了动态和临时静态对象的影响。...
探测移动物体是处理动态环境的一项基本能力。大多数移动物体检测算法都是针对没有深度的彩色图像设计的。对于机器人导航来说,实时的 RGB-D 数据往往是现成的,利用深度信息将有利于障碍物的识别。文章中提出了一种使用 RGB-D 图像的简单移动物体检测算法。该算法不需要估计背景模型。相反,它使用遮挡模型,使我们能够在一个被占主导地位的移动物体混淆的背景上估计摄像机的姿势。所提出的算法允许将运动物体检测和视觉里程计 (VO) 分开,这样就可以在动态情况下结合移动物体检测来采用任意的鲁棒性 VO 方法。...
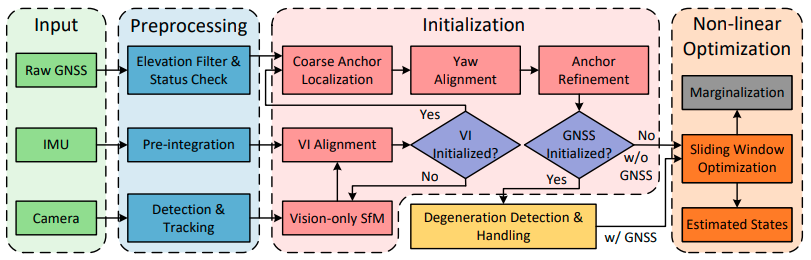
GNSS-视觉-惯性紧耦合的状态估计器主要是将 GNSS (Global Navigation Satellite System) 原始测量,结合视觉和惯性信息紧耦合以进行实时和无漂移的状态估计...
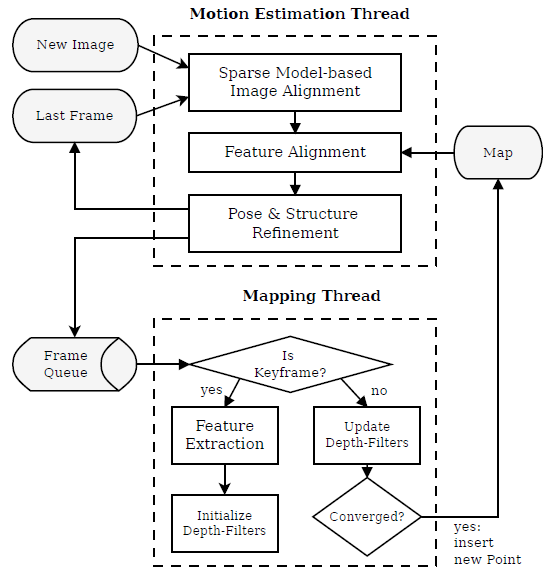
Semi-Direct Visual Odometry, 半直接视觉里程计...
Semi-Direct Visual Odometry, 半直接视觉里程计...