TartanCalib 自适应亚像素细化的广角镜头标定
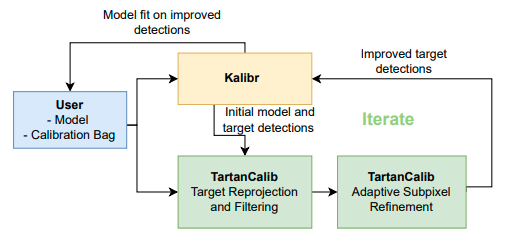
TartanCalib: Iterative Wide-Angle Lens Calibration using Adaptive SubPixel Refinement of AprilTags 广角相机以小、轻、经济高效的外形提供丰富的信息,在移动机器人被广泛选用。内参和外参的精确标定是使用广角镜头边缘进行深度感知和里程测量的关键先决条件。使用当前最先进的技术标定广角镜头会产生较差的结果,这是由于边缘处的极度失真,因为大多数算法假设镜头的低到中等失真(更接近针孔投影)。在这项工作中12,作者提出了精确广角标定的方法。论文的 pipelines 生成一个中间模型,并利用它迭代改进特征检测,最终改进相机参数。作者使用了三种利用中间相机模型的关键方法:(1)将图像分解为虚拟针孔相机,(2)将目标重新投影到图像帧中,以及(3)自适应亚像素细化。将自适应子像素细化和特征重投影相结合,可将重投影误差显著提高26.59%,帮助检测到最多42.01%的特征,并提高密集深度映射下游任务的性能。最后,TartanCalib 是开源的,并在一个易于使用的标定工具 Kalibr3 中实现。系统模型流程如下。 ...